7.3 数据通路
数据通路指数据在CPU内部各功能部件之间传送的路径。理解数据通路对于掌握CPU的工作原理至关重要。
7.3.1 数据通路的基本概念
定义
数据通路:数据在CPU内部各功能部件(寄存器、ALU、主存接口等)之间传送的路径。
组成要素
- 功能部件:寄存器、ALU、主存接口等
- 数据总线:连接各功能部件的通路
- 控制信号:控制数据流动的方向和时机
7.3.2 数据通路结构及其设计
数据通路设计是CPU设计的核心环节,需要系统性地规划指令执行所需的功能部件及其连接方式。
数据通路设计的一般步骤
1. 拟定指令系统
- 确定指令格式:指令长度、操作码位数、地址码位数等
- 确定指令功能:每条指令要完成的操作
- 确定寻址方式:如寄存器寻址、直接寻址、间接寻址等
- 示例:规整型指令、寄存器寻址方式
2. 确定总体结构
- 分析每条指令的执行流程:确定指令执行需要经过哪些阶段
- 确定功能部件:分析每条指令信息流经的功能部件
- 寄存器:PC(程序计数器)、IR(指令寄存器)、通用寄存器(如R₀, R₁, ...)
- 运算部件:ALU(算术逻辑单元)
- 存储接口:MAR(存储器地址寄存器)、MDR(存储器数据寄存器)
- 确定连接方式:单总线、多总线或其他连接方式
3. 安排好工作时序
- 拟定指令流程:将指令执行划分为多个阶段(如取指、译码、执行、访存、写回)
- 拟定微命令序列:确定每个阶段需要哪些微操作控制信号
- 时序控制:确保各微操作在正确的时刻执行
4. 形成控制逻辑实现
- 选择控制方式:
- 组合逻辑型(硬布线控制器):由组合逻辑电路直接产生控制信号
- 微程序控制型:通过执行微程序产生控制信号
- 实现控制逻辑:根据指令的操作码和执行阶段,产生相应的微操作控制信号
设计考虑因素
- 功能完整性:数据通路必须能够支持所有指令的执行
- 性能优化:减少数据传送次数,提高执行效率
- 成本控制:在满足功能的前提下,尽量简化硬件结构
- 可扩展性:便于后续添加新指令或功能
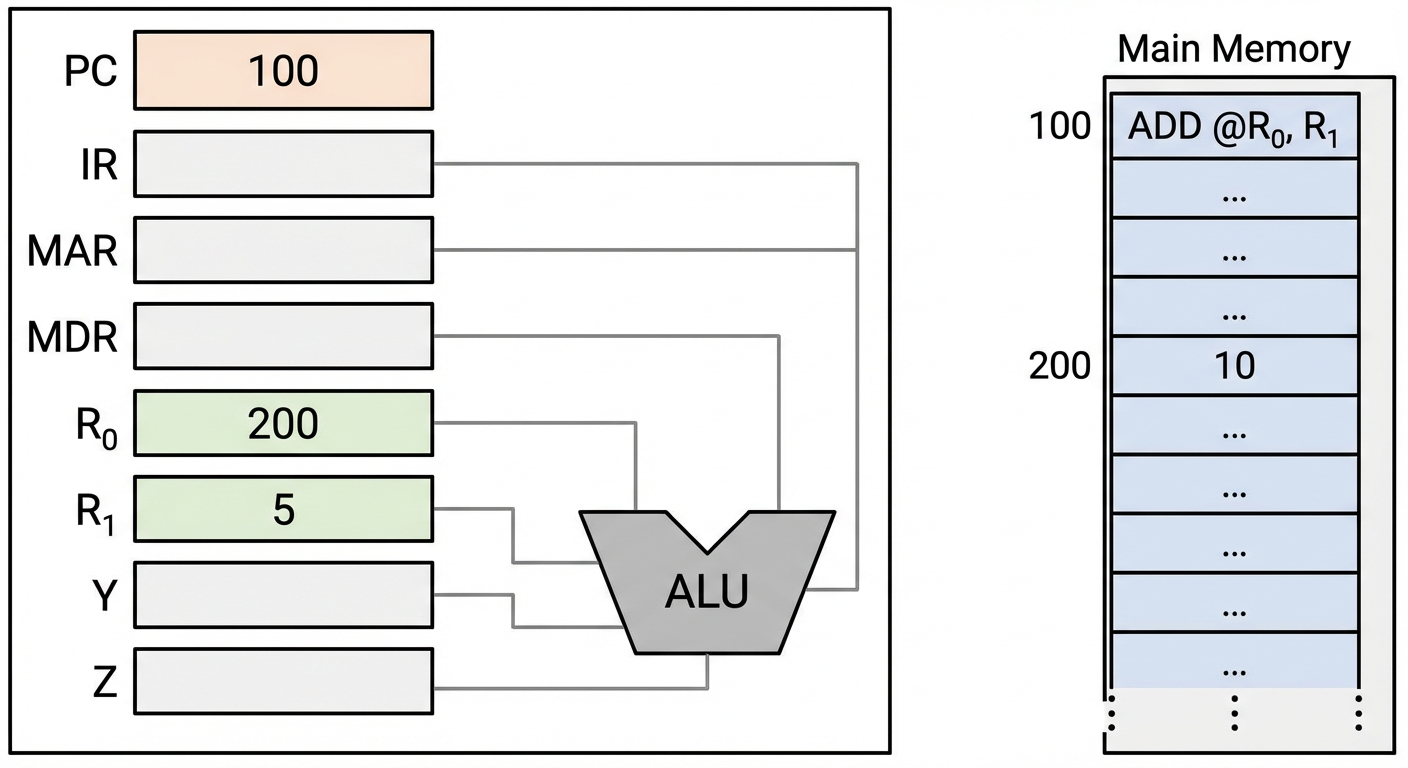
7.3.3 数据通路实例分析
指令:ADD @R₀, R₁
指令功能:
即:以R₀寄存器的内容为地址,从主存取出被加数,与R₁寄存器的内容(加数)相加,结果存回原主存地址。
间接寻址说明
@R₀ 表示间接寻址(Indirect Addressing):
- 符号
@:在指令中表示间接寻址,表示"以...为地址" - 间接寻址的含义:
- R₀寄存器中存放的不是操作数本身,而是操作数的地址
- 需要先访问R₀获取地址,再根据该地址访问主存获取实际的操作数
- 这是一个两次访存的过程
寻址方式对比:
寄存器寻址
操作数就在CPU肚子里,速度最快。
直接寻址
根据指令给的地址,去快递柜(内存)取一次。
间接寻址
R₀里是取件码,先读R₀得地址,再取快递。
| 寻址方式 | 表示方法 | 操作数获取 | 访存次数 |
|---|---|---|---|
| 寄存器寻址 | R₁ | 直接从寄存器R₁读取 | 0次 |
| 间接寻址 | @R₀ | 先读R₀得地址,再根据地址读主存 | 1次(读主存) |
| 直接寻址 | [地址] | 直接根据指令中的地址读主存 | 1次(读主存) |
间接寻址的执行过程:
- 第一步:读取R₀寄存器的内容,得到操作数的地址(例如:100H)
- 第二步:以该地址访问主存,读取实际的操作数(例如:50H)
为什么使用间接寻址?
- 灵活性:可以通过修改R₀的值来访问不同的内存位置,而不需要修改指令
- 指针功能:R₀相当于一个指针,指向主存中的操作数
- 动态寻址:程序运行时可以动态改变R₀的值,实现动态数据访问
在本指令中的体现:
@R₀:表示被加数在主存中,地址存放在R₀中R₁:表示加数直接存放在寄存器R₁中(寄存器寻址)- 因此,执行时需要先从主存读取被加数(间接寻址),再与R₁中的加数相加
执行过程:
交互式微操作仿真
点击下面的组件,通过"下一步"按钮逐步查看 ADD @R₀, R₁ 指令的12个微操作步骤,理解数据在CPU各部件间的流动过程。
指令流水仿真: ADD @R₀, R₁
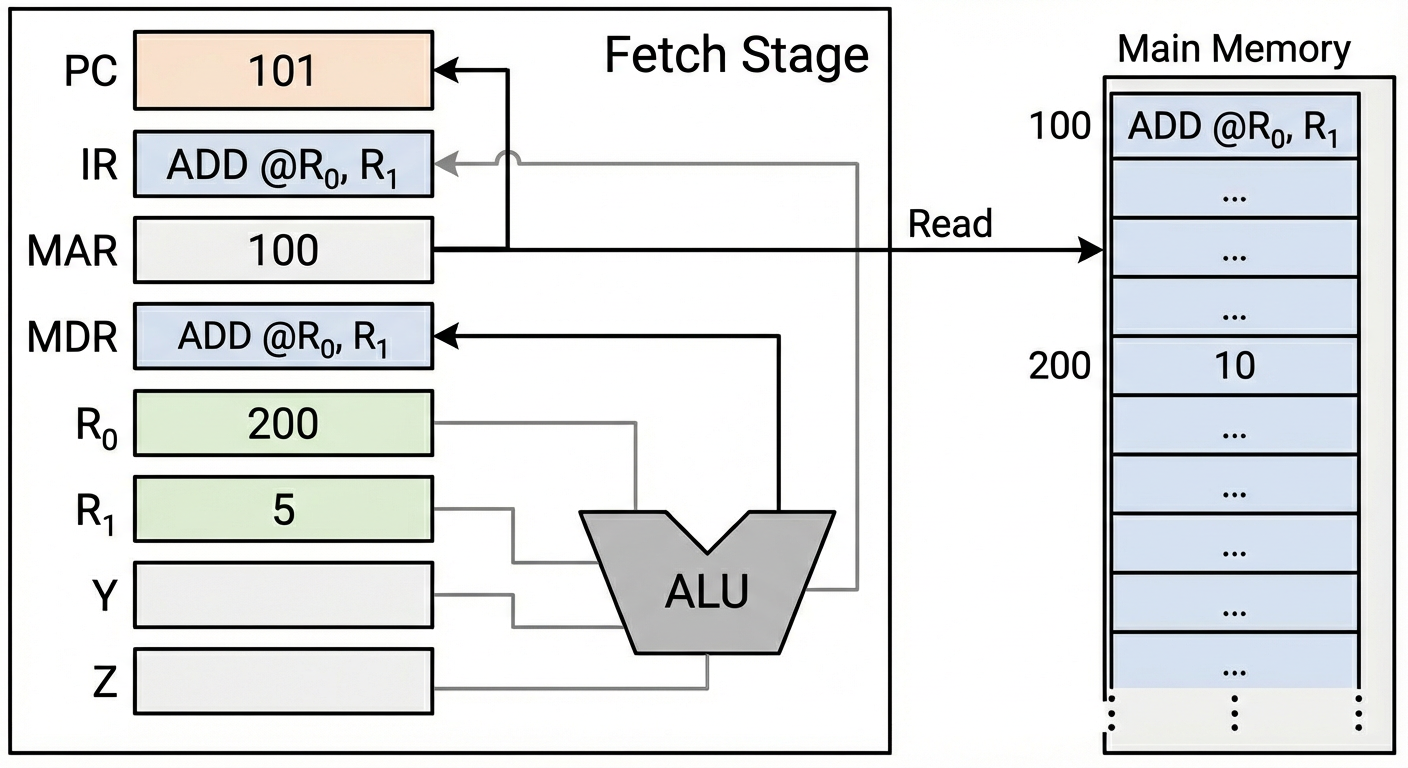
取指开始:将程序计数器中的地址送往地址寄存器。
1. 取指阶段(公共操作)
:程序计数器的内容送至存储器地址寄存器 :主存读命令 :主存将指令送至存储器数据寄存器 :MDR的内容送至指令寄存器 :程序计数器加1,指向下一条指令
为什么不是从 MAR 读取,而是从主存读取?
这是一个非常棒的问题!这说明你正在非常仔细地思考数据在总线上的流动过程。
答案是:不是从 MAR 读取,而是根据 MAR 中的地址,从"主存(Memory)"读取。
这很容易混淆,我用一个生动的比喻来解释 MAR、MDR 和 主存 之间的关系,你就瞬间明白了。
1. 快递柜的比喻
想象你去丰巢快递柜取快递:
主存 (Memory):是整个快递柜(里面放着成千上万个包裹)。
MAR (存储器地址寄存器):是你手里的取件码(比如
1010)。MDR (存储器数据寄存器):是你用来装快递的手提袋。
指令/数据:是柜子里的包裹。
流程是这样的:
你把取件码
1010输入系统(PC -> MAR)。快递柜系统根据这个码,弹开了第 1010 号柜门(MAR -> 选中主存单元)。
你从柜子里把包裹拿出来,放进你的手提袋里(主存 -> MDR)。
最后你把手提袋里的包裹拿回家拆开(MDR -> IR)。
回到你的问题:
如果你说"从 MAR 读取二进制代码",就等于说"从取件码里把包裹拿出来"。
这显然是不可能的,取件码(MAR)只是一串数字,它告诉你在哪里,但它里面没有包裹(指令)。包裹在柜子(主存)里。
2. 硬件连线角度(更专业的解释)
在计算机的硬件连接中,这两者连接的总线是分开的:
MAR 连接的是 地址总线 (Address Bus)。它只能对主存喊:"我要找第 5 号房间!"
MDR 连接的是 数据总线 (Data Bus)。它是用来接收主存回应的:"第 5 号房间里的东西在这里,接好!"
数据流向图:
(告诉我地址) (给我数据)
PC -----------------> MAR -----------------> 主存 (Memory)
| |
| (地址线) | (数据线)
v v
选通存储单元 ----------> MDR
|
v
IR (指令寄存器)总结:
MAR 提供的是 "在哪里" (Address)。
MDR 接收的是 "是什么" (Data/Instruction)。
MDR 里的东西(指令二进制代码)是从主存流过来的,而不是从 MAR 流过来的。 MAR 只是起了个"指路"的作用。
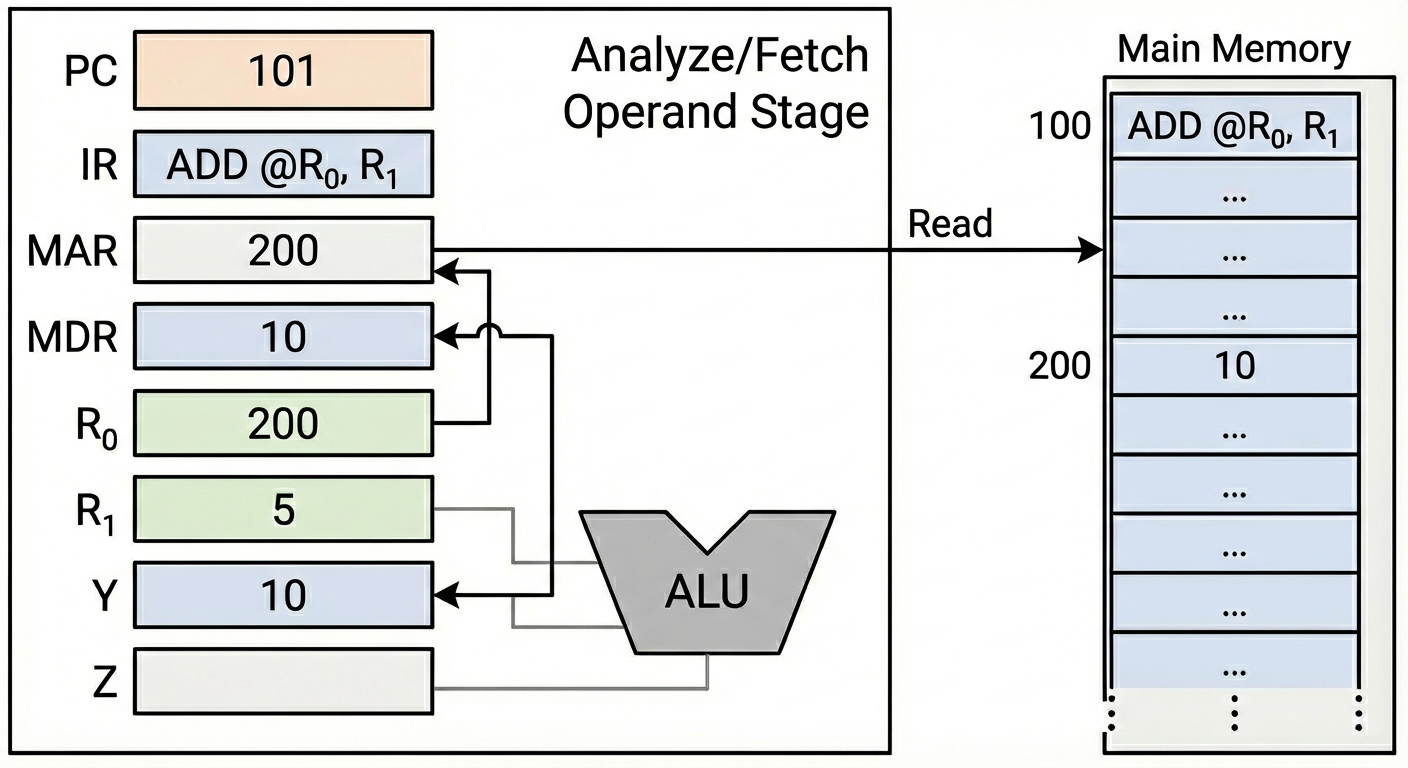
2. 分析取数阶段(获取被加数)
:R₀内容作为地址送至MAR :主存读命令 :从主存读取被加数至MDR :被加数暂存到寄存器Y
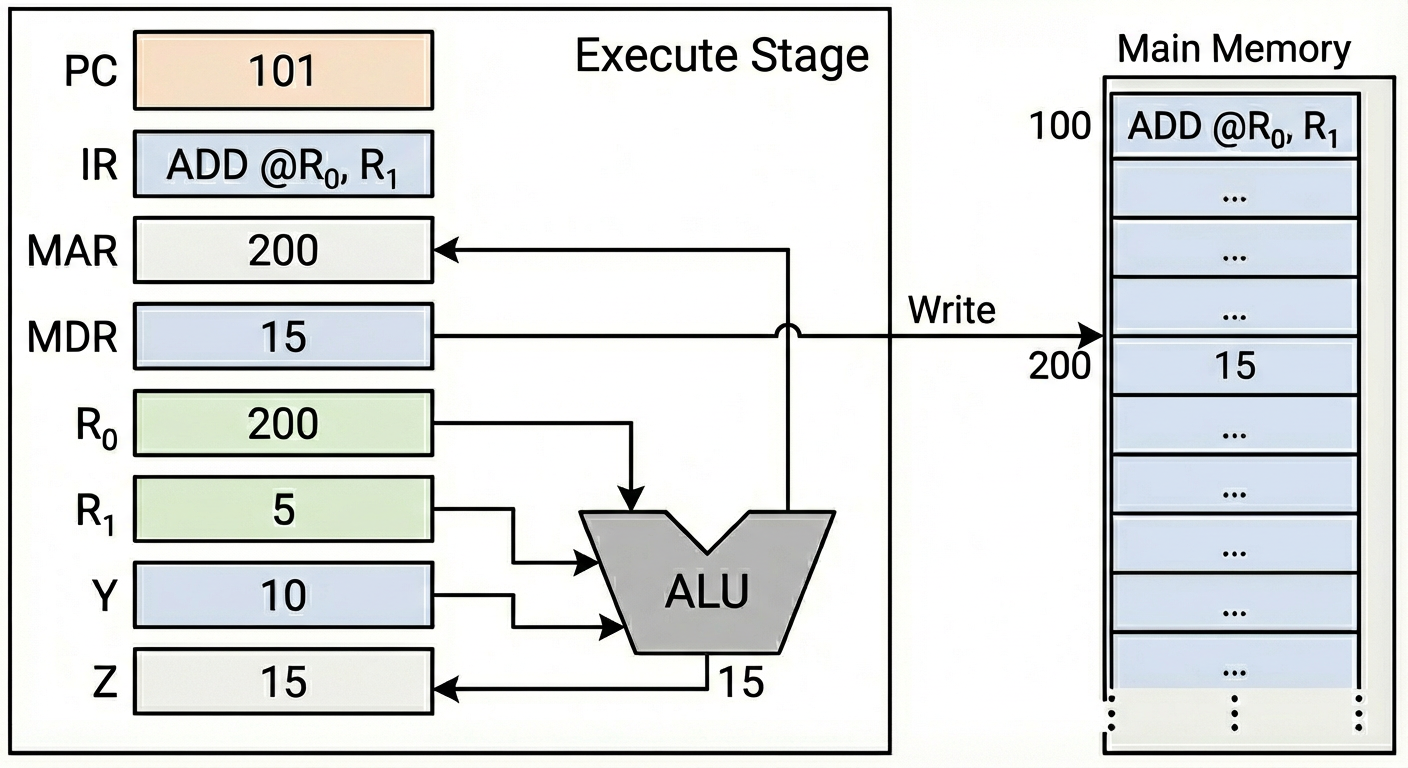
3. 执行阶段
:ALU执行加法,R₁与Y相加,结果暂存到寄存器Z :结果送MDR,准备写回主存 :再次将地址送MAR :主存写命令,将MDR的内容写入 指定的单元
指令:ADD (R₁), (R₂)+
指令功能:
即:将R₁指向的内存地址的值(被加数),加上R₂指向的内存地址的值(加数),结果存回R₂指向的地址,然后R₂自增1。
指令特点:
- 两个操作数都在主存中:需要两次访存读取操作数
- 后自增寻址:
(R₂)+表示先使用R₂的值作为地址,使用后再将R₂自增1 - 结果写回主存:运算结果需要写回R₂指向的内存单元
执行过程:
1. 取指阶段(公共操作)
①
②
③
④
2. 分析取数阶段(获取被加数)
⑤
⑥
⑦
3. 分析取数阶段(获取加数)
⑧
⑨
⑩
取加数:步骤⑧、⑨、⑩完成第二个操作数的获取。
4. 修改目的地址
⑪
修改目的地址:步骤⑪实现后自增寻址,R₂的值在使用后自增。
5. 执行阶段
⑫
⑬
⑭
完整微操作序列总结:
| 阶段 | 微操作 | 说明 |
|---|---|---|
| 取指 | ① | 取指令地址 |
| ② | 发读命令 | |
| ③ | 指令进入IR | |
| ④ | PC自增 | |
| 取被加数 | ⑤ | R₁内容送MAR |
| ⑥ | 发读命令 | |
| ⑦ | 被加数暂存C | |
| 取加数 | ⑧ | R₂内容送MAR |
| ⑨ | 发读命令 | |
| ⑩ | 加数暂存D | |
| 修改地址 | ⑪ | R₂自增1 |
| 执行 | ⑫ | ALU加法运算 |
| ⑬ | 发写命令 | |
| ⑭ | 结果写回主存 |
关键点:
- 本指令共需要3次访存:1次取指令 + 2次取操作数 + 1次写结果
- 后自增寻址:R₂的值先作为地址使用,使用后再自增
- 暂存器C和D:用于暂存两个操作数,供ALU运算使用
- 写回地址:写回时使用的是R₂自增前的地址(因为步骤⑧已将地址送入MAR)
7.3.4 数据通路设计要点
1. 单总线结构
- 特点:所有部件共享一条数据总线
- 优点:结构简单,成本低
- 缺点:同一时刻只能有一个数据传送,效率较低
单总线冲突仿真 (Bus Conflict)
注意:在单总线结构中,同一时钟周期只能有一组数据在总线上自由流动。
2. 多总线结构
- 特点:多条数据总线,可并行传送数据
- 优点:效率高,性能好
- 缺点:结构复杂,成本高
3. 数据通路设计原则
- 功能完整性:能够支持所有指令的执行
- 效率优化:尽量减少数据传送次数
- 控制简化:便于控制信号的生成
💡 学习要点与重难点标注
典型指令的数据流(★需会画图或描述)
取指阶段(公共操作)
所有指令都必须执行的操作序列:
PC -> MARRead(控制总线)M(MAR) -> MDRMDR -> IRPC + 1 -> PC
ADD指令执行阶段示例
R1 + Y -> Z -> MDR (通过ALU运算,暂存到Z,再写入)
老师的意思:这里要掌握的是微操作(Micro-operation)。每一个箭头代表一个微操作,这是后续设计控制器的基础。
为什么讲"数据通路"那么细?
老师未明说的"潜台词":
这是考题的题干。考试可能会给你一个数据通路图(ALU、寄存器怎么连的),让你写出某条指令(如
ADD R1, (R2))具体的执行步骤(微操作序列)。如果不懂通路,后面的控制器设计就没法做。
总结
数据通路是CPU内部数据流动的路径,理解数据通路有助于分析指令的执行过程。通过分析具体指令(如ADD @R₀, R₁)在数据通路上的信息流,可以深入理解CPU的工作原理。