7.4 控制器原理与实现方法
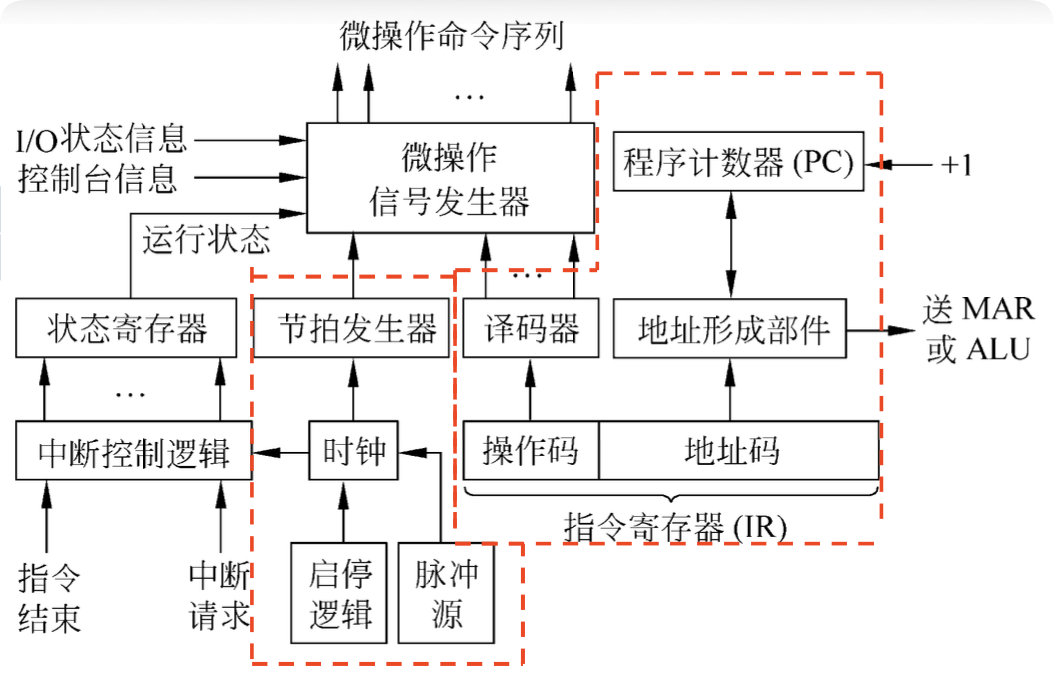
控制器根据指令的要求指挥全机工作。其核心是微操作信号发生器,用于产生各种控制信号。
7.4.1 控制器的基本组成
7.4.2 控制器硬件实现方法(★简答题重点)
硬布线控制器 vs 微程序控制器
| 维度 | 硬布线控制器 (组合逻辑) | 微程序控制器 (存储逻辑) |
|---|---|---|
| 原理 | 纯硬件门电路实现 | 将控制信号编码为微指令存入ROM |
| 速度 | 快 (无访存延迟) | 慢 (需从CM读取微指令) |
| 灵活性 | 差 (修改需重新设计电路) | 好 (修改只需改微程序) |
| 适用 | RISC (精简指令集) | CISC (复杂指令集) |
PLA控制器
- 原理:组合逻辑与存储逻辑的结合
- 特点:折中方案,兼顾两者优点(了解即可,不深究)
7.4.3 处理器架构演进(理解重点)
一、单周期 CPU
特点:
- 一条指令在一个长时钟周期内完成 (CPI = 1)
- 硬件部件不能复用(必须有独立的指令存储器和数据存储器)
致命伤:
- 时钟周期取决于最慢的那条指令(如Load指令)
- 执行快指令(如Add)时大量时间浪费(木桶效应)
- 效率低,硬件成本高
二、多周期 CPU
特点:
- 将指令切分为若干个短状态(IF, ID, EX, MEM, WB)
- 允许硬件复用(ALU既能算地址也能算数据)
- 时钟频率可以提得更高(时钟周期由基本操作决定,而非最复杂指令)
意义:它是流水线技术的前身
三、五阶段划分(★必须背,为7.6流水线打基础)
无论多周期还是流水线,标准的一条指令通常分为这5步:
- IF (Instruction Fetch):取指阶段 - 取指令并更新PC
- ID (Instruction Decode):译码阶段 - 指令译码,读寄存器
- EX (Execute):执行阶段 - ALU运算或计算地址
- MEM (Memory Access):访存阶段 - 读写存储器(如果需要)
- WB (Write Back):写回阶段 - 结果写回寄存器(如果需要)
示例:
Lw需要5个周期(IF, ID, EX, MEM, WB)Add只需要4个周期(IF, ID, EX, WB,跳过MEM)
💡 学习要点与重难点标注
控制器实现方式对比(★常考简答)
| 实现方式 | 原理 | 优点 | 缺点 | 应用 |
|---|---|---|---|---|
| 组合逻辑型(硬布线) | 用门电路实现 | 速度快 | 结构不规整,难修改 | RISC常用 |
| 存储逻辑型(微程序) | 用ROM存微指令 | 规整、易修改(兼容性好) | 速度慢 | CISC常用 |
| PLA型 | 折中 | 兼顾两者优点 | - | - |
处理器架构演进路线(★选择题/理解重点)
老师未明说的"潜台词":
这是一条演进路线。单周期太慢(受限于最长指令);多周期复用硬件;流水线提高吞吐率。复习时要对比它们的优缺点。
对比表:
| 类型 | CPI | 时钟周期 | 硬件复用 | 效率 |
|---|---|---|---|---|
| 单周期 | 1 | 由最长指令决定 | 不允许 | 低 |
| 多周期 | >1 | 由基本操作决定 | 允许 | 中 |
| 流水线 | ≈1 | 由最慢段决定 | 允许 | 高 |
总结
核心考点:
- 硬布线 vs 微程序:硬布线=快但难改(RISC),微程序=慢但易改(CISC)
- 处理器演进:单周期(CPI=1但效率低)→ 多周期(硬件复用)→ 流水线(重叠执行)
- 五阶段划分:IF → ID → EX → MEM → WB(必须背熟,为流水线打基础)
复习建议:这一章把精力主要放在对比表上,其他的只要知道"单周期太慢,多周期切分了状态"这个概念即可。省下时间去攻克 7.5 的微程序编码计算和 7.6 的流水线大题!